 手机版
手机版新闻热线:028-86696397 商务合作:028-86642864
新闻热线:028-86696397 商务合作:028-86642864
2022年智能电动汽车的技术创新和内卷提速。尤其是在高阶自动驾驶领域,视觉和激光雷达多传感器两大技术路线阵营分明,各有支持者。作为汽车智能化领域的皇冠,高阶自动驾驶将是全球各大车企必须通关的“高考”和全力冲顶的 “珠峰”。

集度ROBO-01概念车
当其他车企在视觉和激光雷达间做选择题时,集度首款汽车机器人ROBO-01概念车凭借“视觉+激光雷达”两套自动驾驶系统,给行业提供了第三方案的新路线。并且,集度率先实现的高速、城市、泊车三域融通的高阶自动驾驶,也让此前渐进迭代的自动驾驶赛道,迎来了“突变跃迁、断代卡位”,自动驾驶的高端牌局愈加精彩。
ROBO-01概念车发布后,在媒体采访环节中,集度CEO夏一平对媒体表示,“以特斯拉的Model Y为直接竞争对手,而且要在智能化上完全领先和超越他们一代,这就是我们对这个产品最核心的定义。”
实现算力、算法、架构三大自由,集度在自动驾驶“高考”首个交卷
当下,自动驾驶行业正在由辅助阶段向高阶阶段寻求突破。进入高阶自动驾驶的核心,首先是整车本身要具备高阶智能的能力,目前的智能驾驶辅助只是自动驾驶的“小升初”,整车智能达到高阶阶段,才是自动驾驶“高考”准考证。
整车智能突破高阶自动驾驶临界点的,不光是激光雷达和高清摄像头等先进传感器的数量、种类或位置,也不仅限于扫清战场迷雾的高精地图,更重要的是一整套高阶算法。
高阶算法需要超高算力才能充分发挥,一般认为200-500Tops是高阶自动驾驶的临界算力。超高算力、高阶算法以及大量先进传感器产生的庞大数据,又对智能汽车电子电气架构提出了更高的要求。因此,实现算力、算法、架构的“三大自由”,是包括集度在内的新势力在自动驾驶“高考”金榜题名的前提条件。
首先,是算力自由。
集度汽车机器人初号机ROBO-01概念车,搭载两颗全球最顶级的英伟达Orin X智驾芯片,算力达到508Tops,已经突破高阶自动驾驶的临界算力。集度在全球范围内领先搭载下一代高通骁龙智舱芯片8295,性能是当前主流8155芯片的8倍,其30Tops的算力可作为智驾系统的备份冗余。整体来看,集度汽车机器人的整车算力,完全能够满足高阶自动驾驶的要求,可以充分发挥算法优势。
其次,是算法自由。
集度虽然是新品牌,在算法领域却站在巨人肩上。其全栈应用百度Apollo高阶自动驾驶能力,基于原子化赋能,集度进行了重新集成和开发验证,面向C端乘用车推出高阶自动驾驶系统。百度的自动驾驶技术研发可以追溯到2013年,算得上是国内最早一批,积累也最深厚的自动驾驶平台。在2021年Navigant Research(被Guidehouse收购)的榜单中,百度已连续两年稳居国际自动驾驶"领导者"阵营,并且是领导者行列唯一上榜的中国玩家。百度的技术积累,为集度的智驾算法提供了强大先天基础和大量后天素材,起步即领先。
最后,是架构自由。
集度自研的高阶自动驾驶智能化架构JET(JIDU Evolving Technology),融合了电子电气架构EEA和SOA操作系统,可承载高阶自动驾驶核心功能和AI能力,实现全域融通(域间&域内)。同时,千兆以太网环路,满足高吞吐量数据处理所需的全覆盖、低时延、高带宽要求。也就是说,集度通过JET架构,打通了智舱、智驾等多个域,实现各个域之间无障碍协同。当下,市面其他车企还在努力创新电子电气架构,积极探索跨域融合,而集度实际上已经先人一步,做到了当前行业领先,甚至超特斯拉一个身位。

算力、算法好比是超强大脑,JET架构如同神经网络,让集度汽车机器人能拥有完备的高阶自动驾驶能力,成为自动驾驶“高考”首位入场者。面向未来,算法、算力、架构的三大自由,也让集度在智能汽车的下半场,拥有了强大的初速度和加速度,有能力、有资格提出更完美、更高效的自动驾驶解决方案。
以真冗余打破渐进,传统技术路径外的新可能
当前,自动驾驶分为两派——视觉派和激光雷达派。后者通过多传感器融合,理论上可以应对更多天候、更全场景,但对算法和软硬件适配能力要求更高。视觉方案的算法和决策更符合人眼逻辑,随着技术的升级,确实可以支撑自动驾驶功能,但在部分光学条件和未经训练的场景下,视觉方案也存在难以克服的先天不足。不管是哪种方案,其实对于极端的corner case都会存在局限性,这也是安全事故的隐患所在。
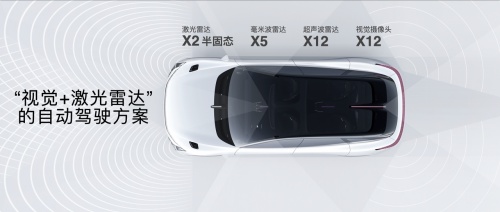
鱼和熊掌何以兼得?集度选择的路径,就是将视觉和激光雷达两种方案结合,即搭载“视觉+激光雷达”两套自动驾驶系统,并且这两套系统相互独立、互为冗余。这样做的好处是,能应对更复杂的场景,最大限度地降低自动驾驶事故发生率。目前,集度ROBO-01概念车已搭载这一方案,并具备完整的高阶自动驾驶能力。
另外,集度的高阶自动驾驶所覆盖的场景之广,也是当下其他车企尚且做不到的。纵观行业,所谓的乘用车自动驾驶其实多为辅助驾驶阶段,且也大多局限于高速或者泊车场景,正在向城市场景延伸,而场景与场景间还相互独立,并没有做到真正的打通。特斯拉以及国内的小鹏汽车等车企都是如此,小鹏汽车也计划2023年才把智能辅助驾驶推向城市场景。这也意味着,当下的辅助驾驶还停留在单一场景下的运行。对于用户来说,从任意A点到B点的自动驾驶还不能完全实现;对厂家来说,跨场景的自动驾驶融通的技术还需要继续突破。
相比之下,集度依托自身真冗余高阶自动驾驶方案,在行业对手未开始布局城市域场景时,已率先实现高速域、城市域、泊车域的三域融通。“三域融通”有两层意思:一是,集度的汽车机器人不是实现一个或者两个场景,而是能完全覆盖三个场景的高阶自动驾驶;二是,“融通”意味着三个场景并不割裂,能做到三个域点到点的高阶自动驾驶,保证了体验的流畅,进一步解放了用户。
随着汽车机器人2023年交付,集度将率先进入高阶自动驾驶阶段,这也是集度能自信地喊出“自由移动”的资本所在。而集度率先突破的关键,是在继承百度Apollo高阶自动驾驶的全套能力和安全体系基础上,进行重新集成和开发验证,最终打通高价自动驾驶的“任督二脉”。
马斯克说过,即使自动驾驶“救了90%的人,剩下10%依然会起诉你”。在自动驾驶事故频发的当下,对用户来讲,安全是选择任何一条路线的核心前提。所以,能够确保驾乘者和出行参与者更加安全的,就是在自动驾驶领域做到技术的全方位、真正冗余,这也是实现高阶自动驾驶的必备条件。
其实,集度的真冗余高阶自动驾驶方案远不止“视觉+激光雷达”两套自动驾驶的相互冗余,背后还有硬核的架构、算法、验证体系的支撑。
开箱即用,真正冗余,高阶自动驾驶能力“突变”
此前,有业内人士认为2026年有望全面向无人驾驶过渡,引起了行业广泛关注。对于如此发展趋势,集度汽车机器人上市交付时,用户即可直接获得多场景下的高阶自动驾驶功能,实现“开箱即用”,为高阶自动驾驶的到来按下了“快进键”。
通过官方和现场资料发现,ROBO-01概念车在前机盖上部署了可升降双激光雷达,以及5个毫米波雷达、12个高清摄像头、12个超声波雷达。尤其是自动驾驶状态下可折叠的U型方向盘,这些都确凿证明了集度高阶自动驾驶能力已准备就绪。

可折叠方向盘
集度“断代卡位”式的技术突变,基于其对极致安全的追求。在智驾系统安全方面,集度率先提出了汽车机器人“安全三理念”——设计安全、验证安全、感知安全,来确保汽车机器人“安全可靠”。
设计安全,是指冗余的架构和算法设计,如具备两套或以上的高阶自动驾驶能力系统,和支持更高阶方案的算力和算法等。
这里首先包括了“三双”,也就是“视觉+激光雷达”独立“双”系统、前机盖“双”升降激光雷达、2枚英伟达Orin X芯片和高通8295芯片的“双"顶级芯片。其次,是基于SOA的舱驾融合技术,实现算力共享、感知共享、服务共享,尤其是当智驾系统失效的情况下,智舱域可接管驾驶任务,做到系统级的安全冗余。同时,智驾域控制器也可支持智舱3D人机共驾地图。集度的舱驾一体backup方案是目前其他车企还难以做到的地方。

3D动态人机共驾地图
尽管集度没有强调自己是L4级的自动驾驶,但是从设计安全就可以看出,集度的高阶自动驾驶实际上是瞄准L4或L5级来建设系统能力的。无论是国内还是国际的自动驾驶技术分级都明确规定,L4级及以上的自动驾驶,其驾驶主体在于系统,这是与各种L2+、L3的重要区别。而集度通过SOA化舱驾融合,让系统接管驾驶任务有了更大权限,能替代用户接管驾驶权。
验证安全,是指高阶自动驾驶产品交付用户前,需完整验证其在量产场景中的安全稳定性。
比如说,百度Apollo智驾算法和能力已得到广泛验证,拥有2700万公里的路测里程,数量庞大的Robotaxi路测车队正在全国30多个城市不间断地开展真实的道路测试,相当于每天会增加4万公里的L4级安全测试里程,近乎绕地球一圈。这都是集度在打造高度安全的高阶自动驾驶时所能继承的底层能力。
另外,集度还打造量产阶段外的平行验证体系SIMUCar(软件集成模拟样车),前置智驾和智舱的软件开发,智能化开发比行业平均进度提前15个月开始。当进入量产阶段时,基于SIMUCar可以做到软件系统与整车正式联调,在这个过程中,会针对更广泛的场景进行专项能力的提升与打磨,并逐渐赋予系统自我学习/进化的能力。
感知安全,是指用户通过视觉、听觉、触觉的交互,能够时刻知晓汽车机器人的安全状态。
一直以来,行业对AI的安全始终保持高度关注,比如说“AI黑盒”就是人们的最大顾虑所在。尽管,集度汽车机器人并不存在所谓的“黑盒”,但是对于一辆AI驱动的、具备高阶自动驾驶和自我成长能力的汽车来说,让用户实时了解汽车的“所思所想”无疑是破除安全信任难题的关键所在。

集度ROBO-01概念车车外“灯语”
以ROBO-01概念车为例,其前脸集成了交互式AI像素大灯和高识别率AI语音交互系统,具备车外语音识别功能,能把汽车的自动驾驶状态、对行人的引导等等通过“灯语”,或者语音传达给车外的其他交通参与者。这就极大提升了行车的安全性。另外,车内实现“全离线”智能语音,并且响应速度在毫秒级,而市面上主流的语音交互系统,不仅离不开网络信号,同时还有超过1秒的延迟。此外,集度还通过视觉感知、声纹识别、唇语捕捉等多模态融合的“类人”交互能力,让人与车的交流“自然流畅”。由此可见,体系化的感知安全,让用户在车内的交互,以及车与外界的互动都能最大程度地得到安全保障。
集度也认为,可被用户感知的安全更为重要,只有实现设计、验证、感知的闭环,才能真正做到“安全可靠”。这可能也是人和汽车机器人之间的信任基础,集度无疑考虑得最为全面。
在AI驱动并接管驾驶权的智能汽车3.0时代,集度开创性的技术方案和前瞻思考,率先完成了对自动驾驶“高考”的布局和卡位,为后来者提供独特的解题思路和技术路径。从行业趋势来看,2023年将提前开启的高阶自动驾驶阶段,也期待集度领跑的中国品牌集群能够交出更好的答卷。
(李华)
 相关推荐
相关推荐
